
立体視は、2つのカメラを使って、物体の深度や3次元構造を計測するための技術です。この原理は、人間の視覚と非常に似ており、両目を使って物の体の位置、形状、距離を認識するのと同様です。 立体視は、主に視差という概念を利用しています。
立体視の原理は以下のステップで構成されます。
- 視差: 2つのカメラは、同じ物体を異なる視点から撮影します。これによって、各カメラの物体の位置が非常に異なる画像が得られます。この位置差を視差と呼びます。
- 対応点の特定: 立体視の次のステップは、2つの画像間で対応する点を見つけることです。これは、同じ物体または特徴を示す点のペアを特定するプロセスです。
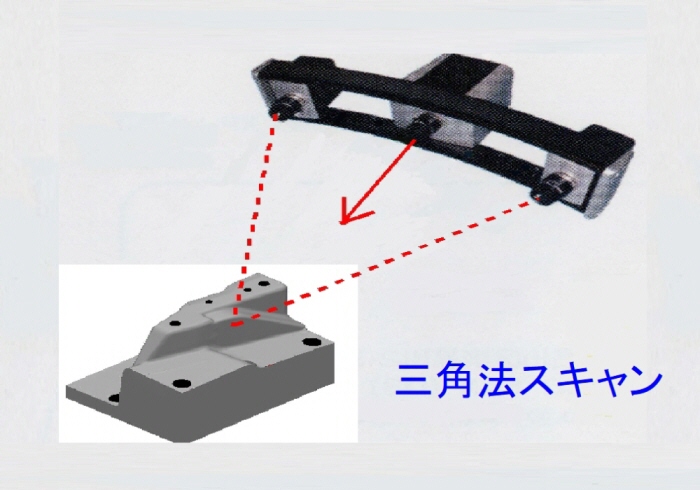
- 三角測量: 一度対応する点が特定されれば、三角測量を使用して物の体の深さを計算できます。これは、カメラの間の既知の距離と視差から、物体までの距離を測ります。
技術的な課題と解決策: 立体視は非常に知覚的な技術である以上、多くの課題が伴います。
- テクスチャのない表面: 一部の物体や表面は、明確なテクスチャや特徴がなく、対応点を見つけるのが難しい場合があります。このような場合、他のセンサーとの統合や、追加の照明を使用するすることで問題を軽減できる場合があります。
- 遮蔽: 物体が他の物体に遮られている場合、一方のカメラでは知覚であるのに、もう視界は見えない場合があります。このような場面での対応点の特定は困難です。
- カメラの補正: 2つのカメラの位置や向き、焦点距離などのパラメータを正確に知ることは、立体視において重要です。これらの情報が不正確な場合、得られる3D情報も不正確になります。
応用例:
- 自動運転車: 立体視を使うことで、車は周囲の環境を3次元で認識し、障害物を気にするための適切な経路を計画することができます。
- AR(拡張現実)/VR(仮想現実) : 立体視を使用して随時で3Dモデルを生成することで、ユーザーの現実の環境にデジタルオブジェクトを配置することができます。
- 医療:立体視は、外科手術の際の精密な手術をサポートするロボット技術の一部として使用されることがあります。
- 地理情報システム(GIS) : 空撮写真やドローンからの映像を使って、立体視を利用して地形の3D視点を行うことができます。
- 映画と出演:立体視は、3D映画の制作や、CGIキャラクターと現実のシーンとの統合にも使用されます。
立体技術は、さまざまな産業や研究分野で革新的な進歩をもたらしており、今後もその視可能性は広がり続けるでしょう。
 |
| <前のページへ> |